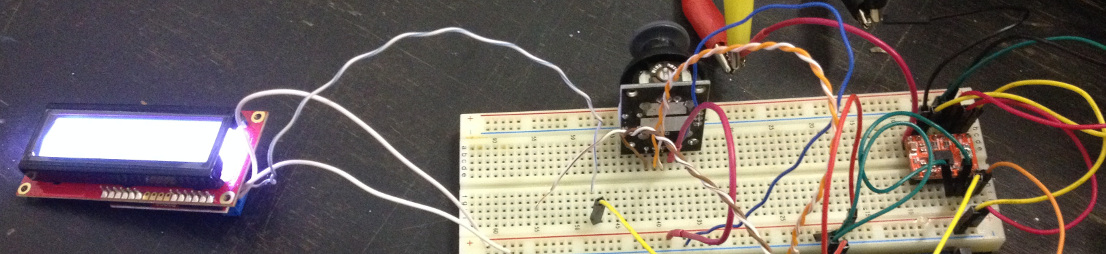
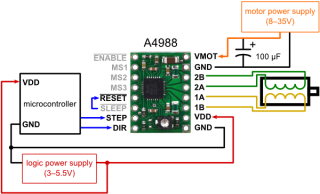
Dopo il lavoro descritto in questo articolo https://openprojects.altervista.org/stepper-motor-driver-4988/ fatto per capire i collegamenti dei motori stepper ho potuto collegare correttamente le fasi del motore stepper alla scheda driver 4899 come illustrato nello schema seguente:
In verità non ho ancora ben capito come individuare il pin A ed il pin B delle singole bobine ma procedo per tentativi. Se il verso di rotazione è sbagliato inverto i collegamenti.
Lo sketch usato per il test è il seguente, tratto dagli esempi della libreria StepperDriver:
/*
* Simple demo, should work with any driver board
*
* Connect STEP, DIR as indicated
*
* Copyright (C)2015 Laurentiu Badea
*
* This file may be redistributed under the terms of the MIT license.
* A copy of this license has been included with this distribution in the file LICENSE.
*/
#include <Arduino.h>
#include “BasicStepperDriver.h”
// Motor steps per revolution. Most steppers are 200 steps or 1.8 degrees/step
#define MOTOR_STEPS 200
// All the wires needed for full functionality
#define DIR 8
#define STEP 9
//Uncomment line to use enable/disable functionality
//#define ENBL 7
// Since microstepping is set externally, make sure this matches the selected mode
// 1=full step, 2=half step etc.
#define MICROSTEPS 1
// 2-wire basic config, microstepping is hardwired on the driver
BasicStepperDriver stepper(MOTOR_STEPS, DIR, STEP);
//Uncomment line to use enable/disable functionality
//BasicStepperDriver stepper(MOTOR_STEPS, DIR, STEP, ENBL);
void setup() {
/*
* Set target motor RPM.
* These motors can do up to about 200rpm.
* Too high will result in a high pitched whine and the motor does not move.
*/
stepper.setRPM(120);
}
void loop() {
// energize coils – the motor will hold position
// stepper.enable();
/*
* Tell the driver the microstep level we selected.
* If mismatched, the motor will move at a different RPM than chosen.
*/
stepper.setMicrostep(MICROSTEPS);
/*
* Moving motor one full revolution using the degree notation
*/
stepper.rotate(360);
/*
* Moving motor to original position using steps
*/
stepper.move(-200*MICROSTEPS);
// pause and allow the motor to be moved by hand
// stepper.disable();
delay(5000);
}