La ricerca su internet ha portato a questo risultato:
http://3dprintzothar.blogspot.it/2014/08/40-watt-chinese-co2-laser-upgrade-with.html
che è ripreso da questo articolo con interessanti variabili:
http://www.filoviva.it/print.php?mod=laseropensource
Per il settaggio dei ponticelli ho seguito le indicazioni della tabella riportata di seguito:
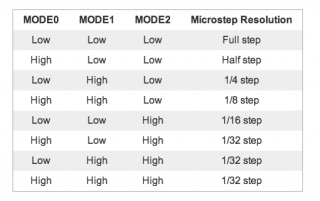
Che si traduce nella configurazione dei pin seguente:
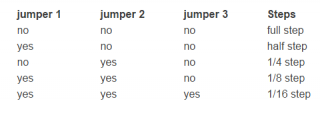
Ovvero quando il MODE deve essere basso non deve essere montato il jumper mentre quando deve essere settato alto deve essere montato il jumper.
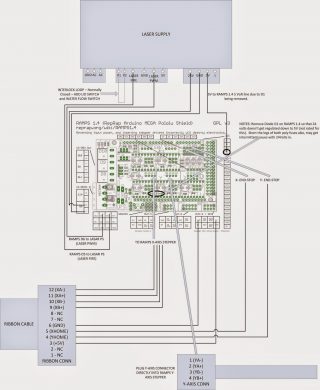
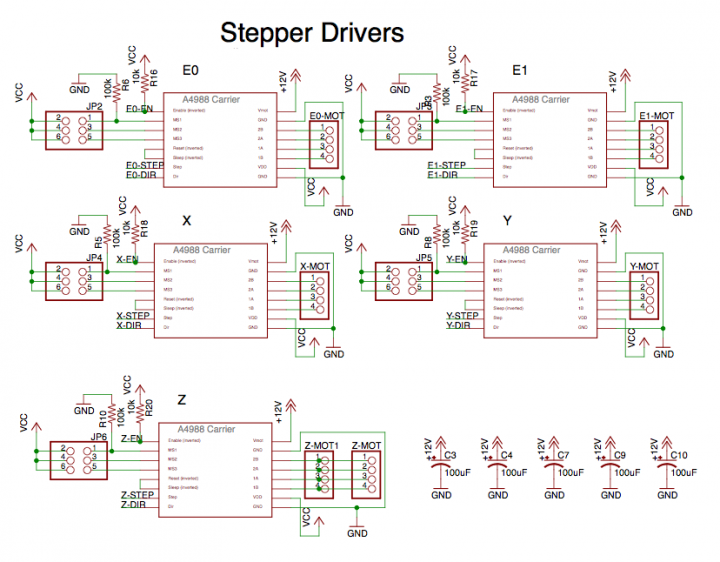
Di seguito il dettaglio dello schema elettrico dei driver:
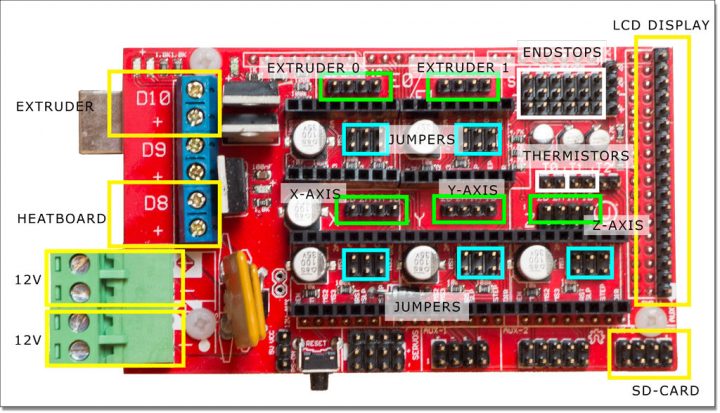
La RAMPS è una scheda pensata principalmente per le stampanti 3D per cui i collegamenti che mostreranno le figure seguenti si riferiscono ai componenti tipici delle stampanti. Rimane utile fare questo escursus per conoscere la funzionalità dei singoli pin in modo da padroneggiare il suo funzionamento.
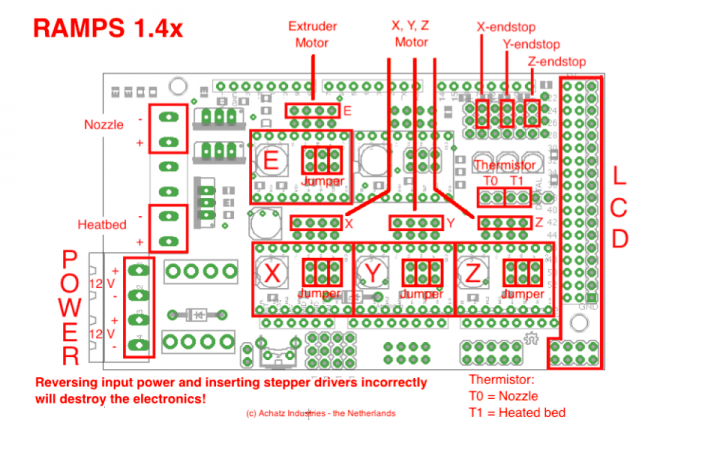
Di seguito una vista complessiva della RAMPS 1.4 board.
In particolare i segnali di end stop associati ai relativi assi:
 Aggiustamento tensione di output dei driver
Aggiustamento tensione di output dei driver
Il driver pololu deve essere settato prima di collegarvi i motori. I NEMA 17 Low Voltage possono sopportare una corrente massima di 1.68 A a 2.8V. Lo stepper pololu può pilotare fino a 2A, molto di più di quanto richiesto, il che può portare ad un surriscaldamento del motore stepper.
Il driver può lavorare senza dissipatore quando lavora al di sotto del 60% della corrente massima in grado di pilotare. Un calcolo che ho trovato su un sito e che riporto qui solo come appunto è il seguente:
Vref=Stepper Motor Max current x Factor current x 0.4
Quindi:
Vref = 1.85 x 0.6 x 0.4 = 0.44V
Non avendo tempo di cercare un riscontro appunto questi calcoli per una verifica futura.
La tensione Vref deve essere misurata tra i punti indicati in figura:
